独立行政法人新エネルギー・産業技術総合開発機構(NEDO)は,「がん超早期診断・治療機器の総合研究開発プロジェクト」において,内視鏡技術・ロボット工学・センシング技術などを融合させた高機能手術支援ロボットの研究開発を進めてきた。
その中で東京大学とオリンパス(株)は,「胸部外科用インテリジェント手術支援ロボット」技術の開発を担当し,全7自由度※1を有し,ひじに相当する関節を用いて,肋骨などの障害物を避けながら患部にアクセスして操作が可能なマニピュレーター※2と,それを制御する小型手術支援ロボットの試作機を完成させた。
オリンパス(株)は,今回の成果を踏まえてさらなる開発を継続するとしており,我が国の高度手術支援ロボット開発がその実用化に向けて着実に進展することが見込まれている。
(写真1)小型マニピュレーターの概観
近年,我が国において,心筋梗塞や狭心症をはじめとする心臓の疾患は,がんに次ぎ,死因の第2位を占めている。冠動脈バイパス術※3に代表される胸部外科領域の手術は,一般的に胸を大きく切開するため,手術が行いやすい一方で胸に大きな傷が残ることや,長期の入院期間を要することが懸念される。さらに,患者の高齢化に伴い,患者にとってより負担の少ない治療技術の確立が,重要かつ緊急課題となっている。
そこで有効な手法のひとつが,低侵襲治療を実現する内視鏡下手術である。内視鏡下手術は,体表面に数個所の小さな穴を開け,術者の「目」となる内視鏡や「手」となる専用器具を体内へ挿入し,内視鏡から映し出される映像を見ながら手術を行う。大きな切開をしないことは,傷が小さく術後の痛みも少ないため,早期回復を可能にするという利点がある一方で,術者にとっては器具の操作に高い技術を必要とするため,未だ限定的な適用にとどまっている。
これを受け,NEDOでは平成20年度より,インテリジェント手術機器の基盤技術の確立およびそれらの技術を融合した革新的医療機器の実用化を目指す「がん超早期診断・治療機器の総合研究開発(旧名:インテリジェント手術機器研究開発)プロジェクト(研究代表者:橋爪誠 九州大学 大学院 医学研究院 教授)に取り組み,その中で東京大学とオリンパスは,「胸部外科用インテリジェント手術支援ロボット」技術の開発(サブプロジェクトリーダー:佐久間一郎 東京大学 大学院 工学系研究科 教授)を実施してきた。なお,本技術の評価は東京大学医学系研究科小野稔教授が担当した。
本技術は,体表面に開けた数個所の小さな穴から内視鏡や器具を挿入して手術を行う内視鏡下手術を,冠動脈バイパス術※3に代表される胸部外科の領域において適用されることを目指し開発した,「マスタ・スレーブ型※4」の手術支援ロボット。
胸部は肋骨で囲まれているため体表面からのアクセスが難しいだけでなく,呼吸や拍動により絶えず動きのある手術の難易度が高い臓器・部位を対象とすることが多くなる。その中でも,拍動下冠動脈バイパス術※3は,動いている心臓上で直径約2mmの血管同士をつなぎ合わせるという,非常に難易度の高い手術。さらに,心臓背側面へのアクセスは特に難しく,内視鏡および器具の挿入角度や作業範囲は,肋骨(ろっこつ)などにより著しい制限を強いられる。これらの制限下でも内視鏡下手術をより迅速かつ的確に行うことを目的に,オリンパスは,物を把持する指に相当するグリッパーに加え,人間の肩・ひじ・手首に相当する7自由度を有したマニピュレーター※2と,それを制御する「胸部外科用インテリジェント手術支援ロボット」技術を開発した。ひじに相当する関節を用いて,障害物を避けながら対象部位へのアクセスと,操作が可能になる。
●開発した技術概要
1. 小型なマニピュレーター※2(写真1)
マニピュレーター※2は,手術台上の1m角内に5台配置可能なほど小型で,容易な設置と撤去を実現する。
2. ロール関節を有した先端3自由度処置具(写真2)
マニピュレーター※2先端の処置具は,指にあたるグリッパーに加え,ロール関節と2つの屈曲関節の3自由度を有し,関節をひじのように屈曲させた状態で,ロール関節を用いて針かけ操作※5が可能。小型なマニピュレーターは,本処置具を含めて全7自由度となる。
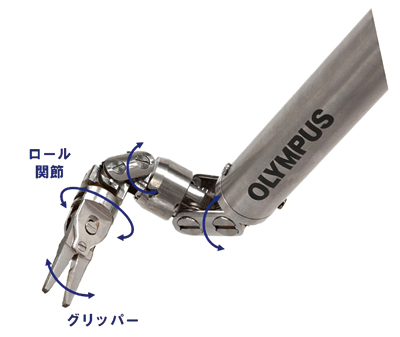
(写真2)ロール関節を有した先端3自由度処置具
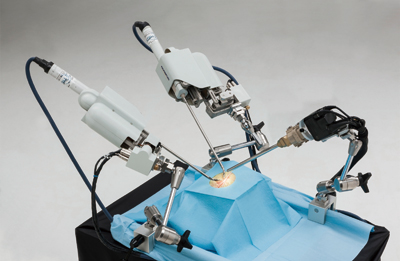
3. 多関節を意識させない「マスタ・スレーブシステム」※4(写真3)
あたかも処置具先端をつかんでいる感覚で,マニピュレーター※2の多関節を意識せずに自在に操作することができる。

(写真3)手術支援ロボットレイアウト
※1 自由度とは,自由に動かせる方向の数のこと。人間の手首は,上下・左右・捻りの3つの方向に動かせるので3自由度になる。
※2 ロボットの手や腕にあたる部分。
※3 心臓に栄養を供給する冠動脈の内側が狭くなり(狭窄),血流の流れが悪くなった部分に,胸の血管(内胸動脈)等をつないで迂回路(バイパス)を作り,血液が十分に流れるようにする手術。内径約2mmの血管同士をつなぐため,高い精度が要求される。
※4 マスタと呼ばれる操作入力装置を操作者が操作すると,スレーブと呼ばれるマニピュレーターが,その動きに応じて動作するシステム。
※5 患部の血管に対して湾曲針を引っ掛ける操作。
本手術支援ロボットは研究開発段階であり,薬事未承認品。 |
